ロボット制御プログラムにはフィルタ計算や通信(プロセス間・端末間)などが何度も登場します.それらを各ロボットごとに書くのは非効率な上にソースの可読性も落ちるので,ライブラリ化しました.git clone && cmake && make && make installで環境が整うのでロボット制御の際には是非お試しを.
HAR ( Human Activity Recognition : 人間行動認識 )とは,カメラやセンサなどの様々な機器から得られた情報をもとに,人間の行動を学習・推定する認識技術分野のことです.
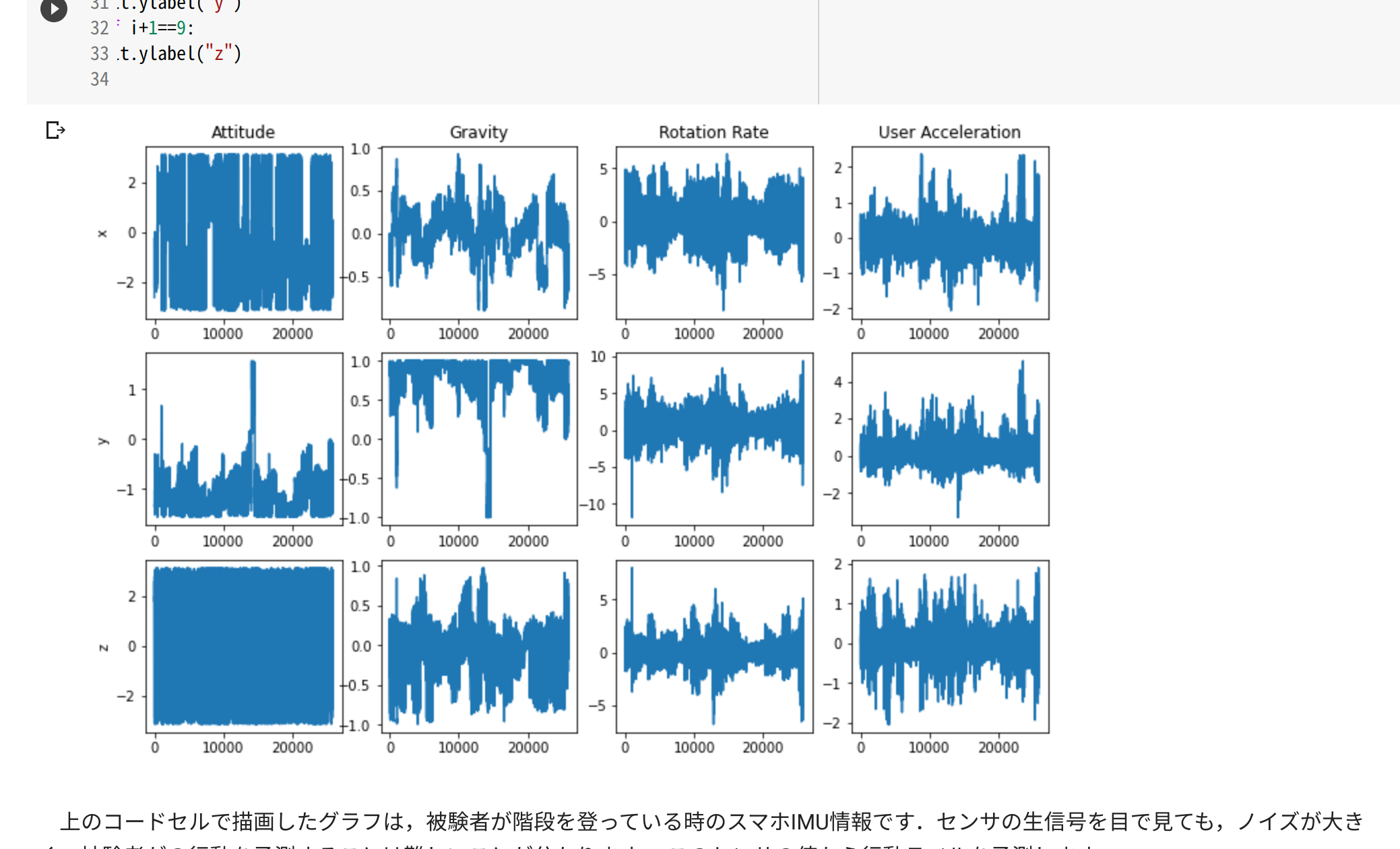
リンク先のリポジトリには,スマホのIMU情報(姿勢・重力・角速度・ユーザの加速度)をもとにユーザの行動を予測するスクリプトが置いてあります.pytorchやsklearnを用いて実装されていて,他のデータ分析にも応用できるはずです.